China gelingt neuer Meilenstein
Erster selbstentwickelter Weltraum-Bergbau-Roboter
Die China University of Mining and Technology (CUMT) hat erstmals in Chinas Geschichte einen Weltraum-Bergbau-Roboter entwickelt. Dieser Prototyp sei nun bei den zuständigen Behörden zum Patent angemeldet worden und habe die ersten Prüfungen bereits erfolgreich bestanden.
Chinas erster Weltraum-Bergbau-Roboter wurde von der China University of Mining and Technology (CUMT) entwickelt. Er passt sich nicht nur an die Mikrogravitationsbedingungen im Weltraum an, sondern navigiert auch durch die zerklüftete Kraterlandschaft von Asteroiden, berichtete CCTV News am Sonntag. Der Prototyp sei nun bei den zuständigen Behörden zum Patent angemeldet worden und habe die ersten Prüfungen erfolgreich bestanden, so der Bericht.
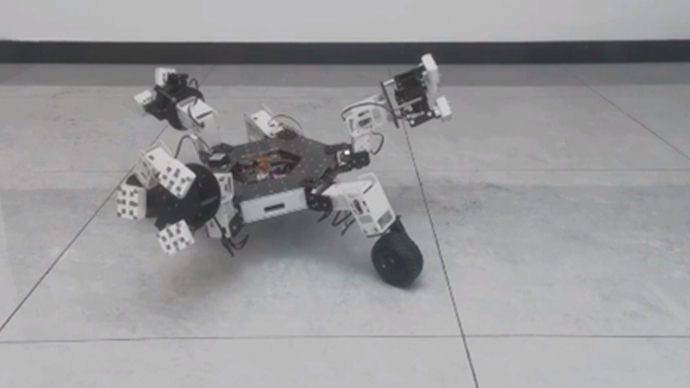
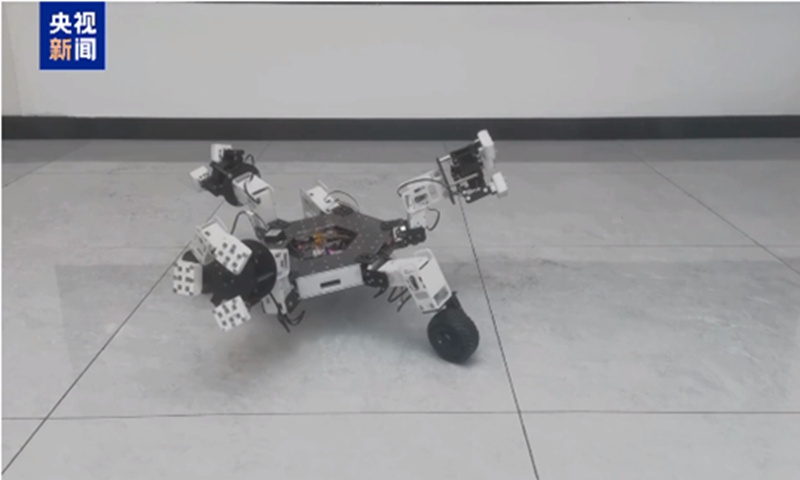
Dieser multifunktionale Weltraum-Bergbau-Roboter wurde von einem Forschungsteam unter der Leitung von Professor Liu Xinhua an der CUMT entwickelt. Laut CCTV verfügt er über eine sechsbeinige Konfiguration mit drei Gliedmaßen mit Rädern und drei Gliedmaßen mit Klauen.
Laut Liu wurde das Design in erster Linie entwickelt, um sich an die Schwerelosigkeit im Weltraum anzupassen, so der Bericht.
Weltraum-Bergbau-Roboter sind mit der geologischen Erkundung und dem Sammeln von Mineralien auf extraterrestrischen Körpern konfrontiert, wofür sie wesentliche Bohrfähigkeiten benötigen. Unter der Schwerkraft der Erde reicht das Eigengewicht des Roboters aus, um das Eindringen des Bohrers zu unterstützen. Die Schwerkraft des Mondes beträgt jedoch nur ein Sechstel der Schwerkraft der Erde, und Asteroiden weisen oft eine extrem niedrige Schwerkraft auf, was das Bohren auf ihrer Oberfläche zu einer großen Herausforderung macht.
Um das durch die Schwerelosigkeit verursachte Problem zu lösen, ließ sich das Team von den Krallen- und Wirbelsäulenstrukturen von Insekten inspirieren und stattete den Roboter mit speziellen Krallengliedern aus. Laut Liu verbessert das Design der Krallen die Haftungs- und Verankerungsfähigkeiten in der Schwerelosigkeit, so dass der Roboter sich für die Probenahme stabilisieren und seine Bewegungen an das Gelände anpassen kann.
Über die Anpassung an die Mikrogravitation hinaus kombiniert die bionische sechsbeinige mobile Struktur des Roboters Räder und Verankerungsmechanismen an den Gliedmaßen, die eine Fortbewegung auf unebenen Asteroidenoberflächen ermöglichen, heißt es in dem Bericht.
Liu sagte, dass sie gleichwertige Experimente für Mikrogravitationsbedingungen durchgeführt hätten. „In simulierten Mondbodenumgebungen kann der Roboter laufen, sich verankern und sogar Proben sammeln“, fügte er hinzu.
Der Prototyp des Weltraum-Bergbau-Roboters wurde bei den zuständigen Behörden zum Patent angemeldet und hat die ersten Prüfungen bestanden, heißt es in dem Bericht.